 Textbooks are great for building concepts, and would probably bombard you with a plethora of information that you might think is enough to strive in the practical world. The truth however uncovers itself the day you graduate and get an on-site job. Several graduates are surprised with the level of differences with what goes in the field, and what was taught in the classroom.
Textbooks are great for building concepts, and would probably bombard you with a plethora of information that you might think is enough to strive in the practical world. The truth however uncovers itself the day you graduate and get an on-site job. Several graduates are surprised with the level of differences with what goes in the field, and what was taught in the classroom.
When it comes to PID control systems, the effect gets amplified due to the number of inaccuracies that need to be considered in the real world. How can one go along the PID Learning Curve, and come out an expert? Namely, by doing in field testing and optimizing on PID controls.
Terms to Know
Consider a chemical plant that has an ethylene production area, with the operator struggling to maintain a 500 gal chemical tank, part of the chemical line process.
The first thing that needs to be seen is the setpoint signal, which in this case may be a 0-10VDC signal from a potentiometer, reflecting the level of chemical required in the tank. Next, the feedback signal needs to be checked, which may be generated from a device such as a liquid level transducer that provides a 4 to 20mA signal based on the liquid level. Lastly, the item required is the actual PID controller.
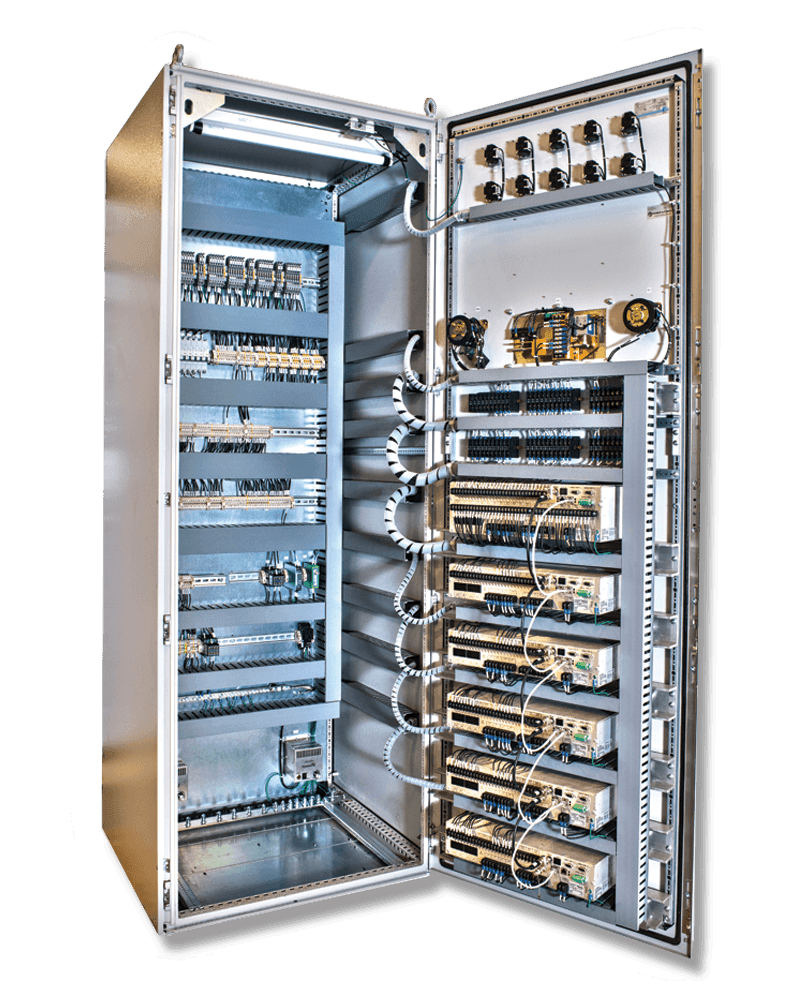
Controllers today are hosted within self-standing modules, that are set to receive the setpoint and feedback signals, while performing arithmetic PID calculations as well. Stand-alone PID control modules are available as well, but if the need arises, PID controls are available in VFDs and PLCs as well.

Testing
A good way of diagnosing the control system is by checking the lower/upper bounds of the sensor. For instance, the liquid level sensor can be checked in the above example to see of its providing 4mA and 20mA at low and high levels respectively. Next, the setpoint signal can be checked, by adjusting the control knob, which in this case is a potentiometer from min to max. The signal can be measured using a multimeter and its values verified. If this goes smoothly as well, check for the valve, and if it opens/closes with an independent controller then the problem can be narrowed down to the PID module.
There are several types of PID modules available in the market. For this article’s sake, let’s consider one that has three selector switches:
- One for proportional gain setting
- One for integral time setting
- One for derivative time setting
Setting the selector switches on the new module and making identical configurations may do the trick, but going the extra mile would be even better in the long run.
PID Optimization
By tweaking the proportional, integral and derivative settings, optimization can be achieved, which can help improve the entire process. The following are a few golden rules that can help make the PID controller more efficient:
- Making changes to all three controls at the same time can cause disorientation and confusion. Instead, work on one adjustment a time.
- Proportional gain controls the speed with which a process reaches the setpoint. If set at a high level, the setpoint would be reached quicker but the risk of drastic overshoots and oscillations also increases. If set very low, it would eliminate overshoots but increase the overall time.
- The best way to approach this is by starting with the integral time, derivative time, and proportional gain values set to zero, then increasing the proportional gain first in small amounts until minimal oscillations occur.
- The integral time can be seen as an error eliminator, reducing the oscillation time and removing the offset. However, improper adjustment can result in a sharp increase in the overshoot, in addition to oscillations. Approach this similar to the proportional gain, steadily increasing it until the oscillations and offset have been neutralized.
- The derivative time acts as a braking mechanism for the control loop, and isn’t required in several applications where overshoot is insignificant. Derivative control can help eliminate overshoots but can cause reduction in responsiveness as well. Slowly increase the derivative time until the response achieved is optimum.
Interested in learning more? Talk to one of our professionals at PanelShop.com.